.webp)
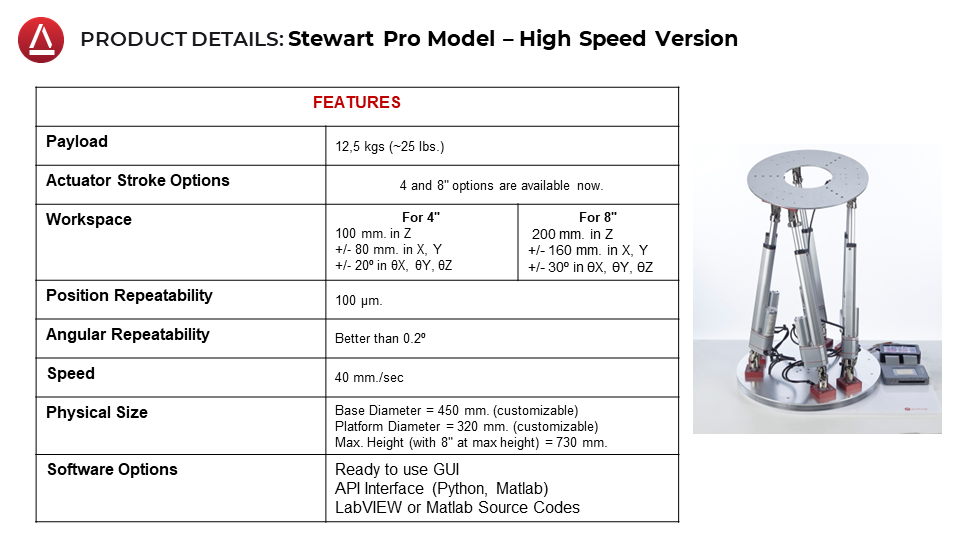
Stewart Platform
6-DoF sophisticated motion system for robotics and controls
ACROME Stewart Platform is a parallel robotic system, could be used for advanced robotics concepts in academia and various applications in industry. It has a default configuration for payload, size and user software.












.png)