Introduction: The Significance of MIMO Systems
1.1 Why MIMO?
Traditional control systems often rely onthe single-input–single-output (SISO) paradigm, which, while foundational, isinsufficient for addressing the complexities of real-world engineeringchallenges. In many practical scenarios, multiple variables interact simultaneously, necessitating a more sophisticated approach. Multi-inputmulti-output (MIMO) systems address this need by allowing several inputs toinfluence multiple outputs, often in a highly interdependent manner.
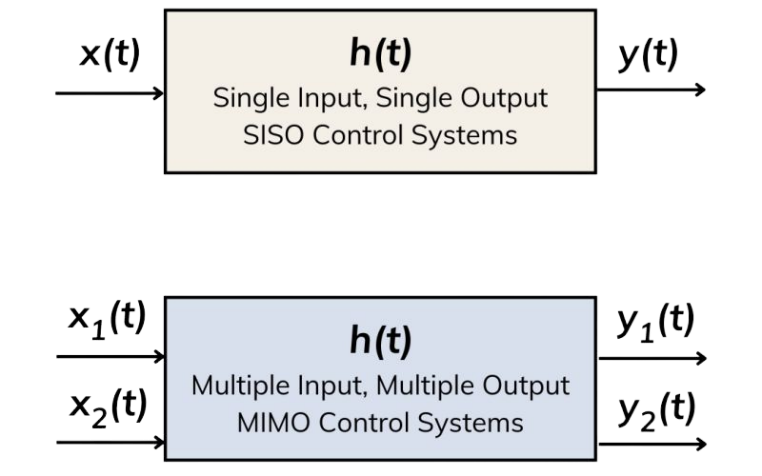
In certain MIMO systems, input-output relationships may be decoupled; however, in most advanced applications—such as helicopters, robotics, and industrial automation—inputs are intricately coupled, meaning that a change in one input can affect several outputs. This coupling introduces significant complexity into the control process, making MIMO systems indispensable in modern control engineering.
1.2 Real-World Example: Helicopter Dynamics
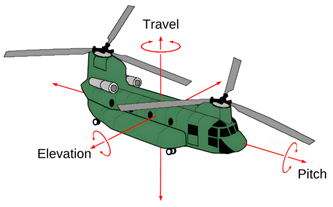
A helicopter exemplifies the essence of a MIMO system. The thrust generated by its propellers not only governs verticalmovement but also directly impacts yaw, pitch, and roll. Thus, a single controlinput can simultaneously influence multiple axes of motion, resulting in adynamically coupled system where variables are deeply interdependent.
2. MIMO Systems and Advanced Control Strategies
2.1 Defining MIMO Systems
MIMO systems are characterized by their dynamic structure, where multiple inputs and outputs interact in real time. The hallmark of these systems is the presence of coupled dynamics—each input can have direct or indirect effects on several outputs. This complexity enables MIMO systems to accurately represent intricate real-world processes but also poses significant challenges for control design.
2.2 Modern Control Approaches
Designing effective controllers for MIMO systems requires advanced methodologies that go beyond classical techniques(see this article for known control techniques and some real-world examples from ACROME). While PID controllers may suffice for simple or weakly coupled systems, they are inadequate for highly interactiveenvironments. Modern control strategies include:
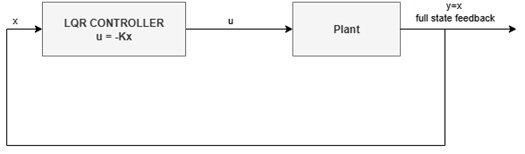
- LQR / LQG (Linear Quadratic Regulator / Linear Quadratic Gaussian): Optimal control using state-space models to achieve a balance between system stability and performance.
- Kalman Filtering: By filtering out sensor noise, Kalman filters enhance measurement accuracy, thereby increasing the reliability of the control system.
- Nonlinear Control: Essential for systems exhibiting significant nonlinear behavior,such as those affected by complex aerodynamic forces. There are many options for nonlinear control as well.
2.3 Research and Practical Relevance
The adoption of these advanced control methods has revolutionized both academic research and industrial practice. MIMO control frameworks enable rigorous analysis and experimentation, fostering the development of innovative algorithms and safer, more efficient systems. They serve as a critical bridge between theoretical advancements and practicalimplementation.
3. Experimental Learning with the ACROME 3-DoF Helicopter
3.1 The Role of the ACROME Kit
The ACROME 3-DoF Helicopter Experiment Kit is purpose-built to facilitate hands-on exploration of MIMO control principles.This sophisticated model allows users to implement and test a variety of control strategies in a controlled, experimental setting.
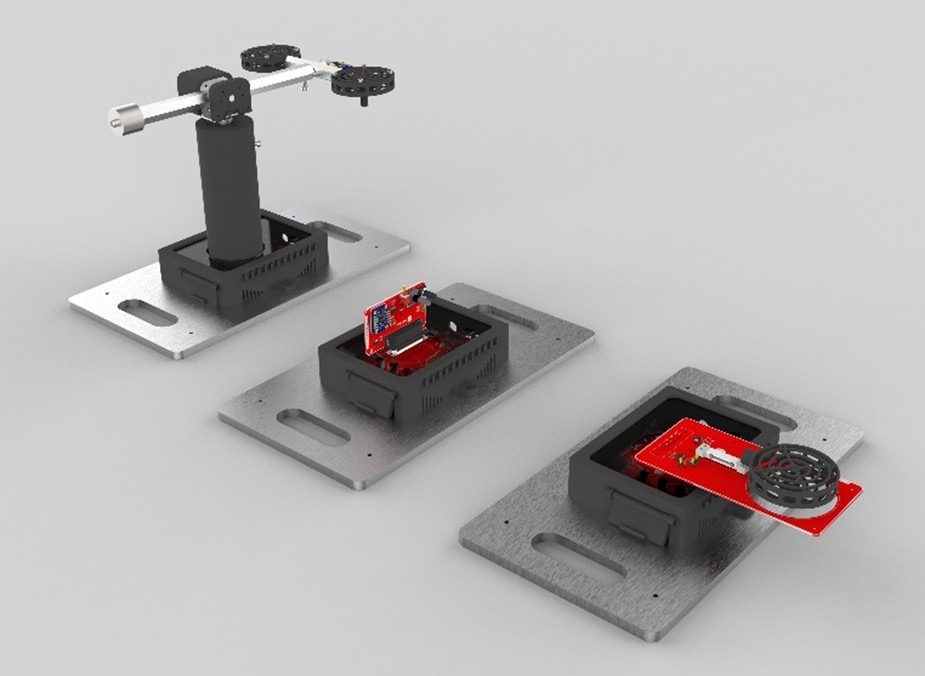
3.2 Key Features and Advantages
- Sensor Simulation: Enables real-time modeling of sensor data within a virtual environment, enhancing the realism and flexibility of experiments.
- Thrust Measurement: Provides precise measurement of engine thrust, supporting detailed analysis and optimization.
- Advanced Control Experiments: Supports the application of cutting-edge control methods, including LQR/LQG and nonlinear control, allowing users to move beyond theory into practical experimentation.
4. Applications in Education, Research, and Industry
4.1 Educational Impact
The ACROME 3-DoF Copter transforms abstract control concepts into tangible learning experiences. Students can directly observe and manipulate the effects of various control strategies, solidifying their understanding and fostering long-term retention.
4.2 Research and Industrial Applications
For researchers, the kit offers a versatile platform for testing and refining new control algorithms. In industrial contexts, it provides a cost-effective and safe environment for prototyping and validating control solutions before deployment in real-world systems.
5. Conclusion
5.1 Overall Assessment
MIMO systems represent one of the most challenging yet vital domains in engineering. The inherent complexity of managing multiple, interacting variables demands sophisticated control strategies. The evolution from classical PID controllers to advanced methods such as LQR, LQG, and nonlinear control has significantly expanded the capabilities and applications of MIMO systems.
5.2 The Value of the ACROME 3-DoF Helicopter Kit
- Virtual data generation and analysis through sensor simulation.
- Experimental measurement of propeller thrust.
- Comprehensive modeling of rotor and system dynamics.
- Support for advanced control experiments.
Thanks to these opportunities, students turn theory into practice; researchers and industry professionals also have access to a low-cost and secure testing environment. Thus, understanding MIMO and dynamic coupled system structures has become much more accessible and efficient for future engineers.
REFERENCES
[1] K. Ogata, *Modern Control Engineering*, 5th ed. Upper Saddle River, NJ: Prentice Hall, 2010.
[2] S. Skogestad and I. Postlethwaite, *Multivariable FeedbackControl: Analysis and Design*, 2nd ed. Chichester, U.K.: Wiley, 2005.
[3] J. G. Leishman, *Principles of Helicopter Aerodynamics*, 2nd ed.Cambridge University Press, 2006.
[4] G. F. Franklin, J. D. Powell, and A. Emami-Naeini, *Feedback Control of Dynamic Systems*, 8th ed. Pearson, 2022.
[5] B. D. O. Anderson and J. B. Moore, *Optimal Control: Linear Quadratic Methods*, Dover Publications, 2007.
[6] R. E. Kalman, “A New Approach to Linear Filtering and Prediction Problems,” *ASME Journal of Basic Engineering*, vol. 82, pp. 35–45, 1960.
[7] H. K. Khalil, *Nonlinear Systems*, 3rd ed. Prentice Hall,2002.
[8] ACROME Robotics, “3-DOF Helicopter Experiment – User Manual,”2023. [Online]. Available: https://acrome.net/products/3-dof-helicopter
[9] MathWorks, “Modeling and Control of a 3-DOF Helicopter,” 2024.[Online]. Available: https://www.mathworks.com/help/simulink/slref/helicopter-modeling-and-simulation.html
Author
