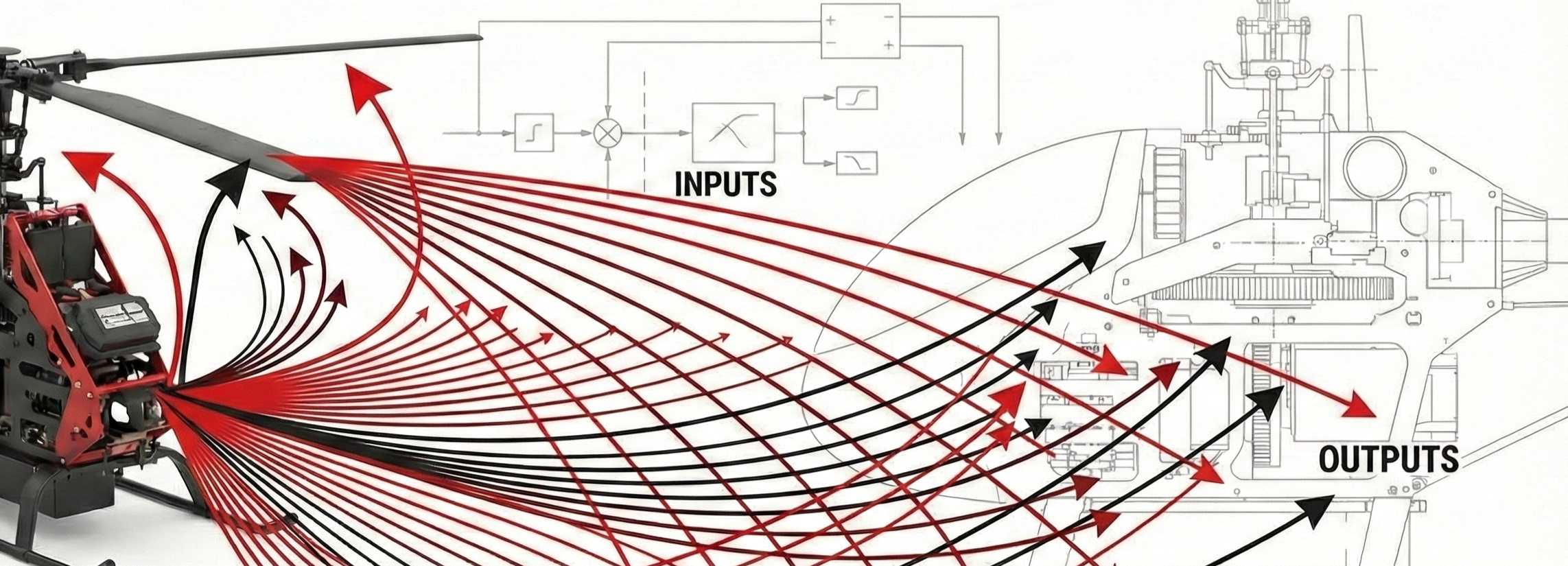
The twin rotor system is a classic, dynamically coupled Multi-Input Multi-Output (MIMO) platform, often used as a laboratory model to explore complex control principles like those found in a helicopter. The primary challenge is the dynamic cross-coupling between the two inputs (rotor thrusts) and two outputs (pitch and yaw angles). Designing a robust controller requires accurate mathematical modeling, typically using a state-space representation to capture the system's internal states holistically.

This article explains the basic concepts, control methods, and application areas of MIMO systems. Beyond the traditional PID control approach, the importance of modern methods such as LQR/LQG and non-linear control is emphasized. In addition, the benefits of ACROME's 3-DoF Copter kit — sensor support and simulation, thrust measurement, dynamic modeling, and advanced control experiments — are discussed.
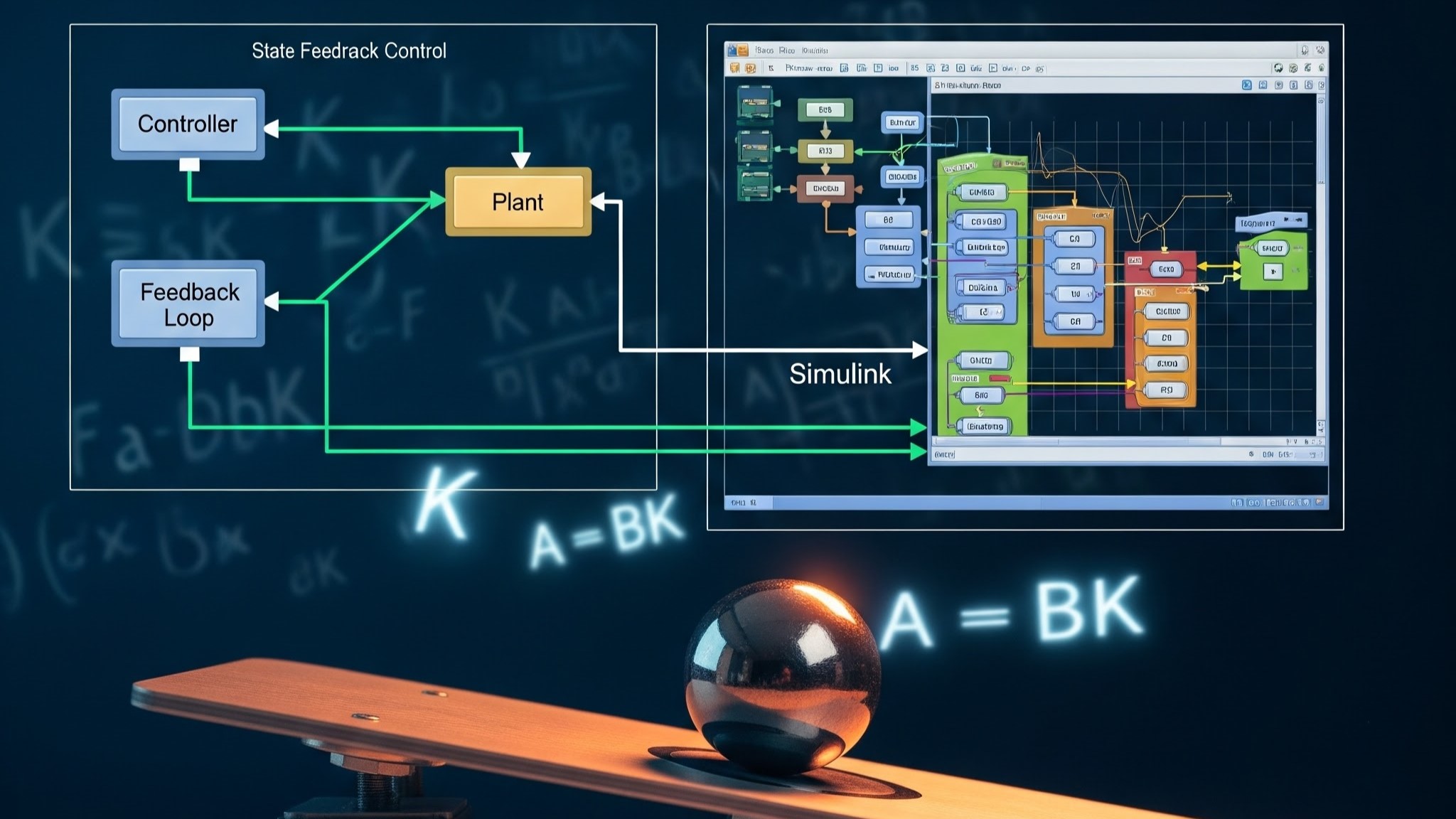
Check this article about a State Feedback Controller implemented on Acrome's Ball Balancing Table. Covers hardware, theoretical principles of state feedback and pole placement, and a practical MATLAB/Simulink implementation. Also demonstrates controller gain calculation, controllability checks, and presents simulated results, emphasizing the educational application of modern control techniques.

In this project, we investigate the application of PID control and Q-learning algorithms to the Ball Balancing Table (BBT) in order to solve a maze. An open-source tool called the BBT makes it possible to experiment with control systems directly. The device can guide a ball through a maze by adjusting the tilt of the table, imparting important knowledge about reinforcement learning, control theory, and feedback systems. The table's orientation is adjusted by using a PID controller in response to real-time feedback from the ball's position. A matrix of 0s and 1s with open paths and walls, respectively, is used to depict the maze. The system associates movements with the Q-learning reinforcement learning algorithm to learn how to move the ball through the maze.

The Ball Balancing Table is described as a versatile platform with various software options, allowing users to experiment with different control strategies. Bode diagrams are highlighted for their role in observing system stability, assessing performance, designing controllers, and troubleshooting. The document emphasizes the practical applications of these tools in real-world scenarios, bridging the gap between theoretical concepts and practical applications in control systems engineering.